About

Hello! I'm Derek, a PhD student in the Field Robotics Lab at Brigham Young University. I love working on hands on projects where I can play a part in the development of multiple aspects in a robotic system. I expect to graduate spring 2026 and am actively looking for a full time position upon graduation.
Download My ResumeMy Skills
C/C++
Python
Embedded Systems
Perception and Navigation
Machine Learning & Optimization
Kalman Filtering
SLAM
Computer Vision
ROS/ ROS2
Research
Gaussian Process Based Mapping
Currently researching ways we can map and explore with Gaussian Process Regression to minimize map uncertainty in underwater environments
ASV State Estimation
I'm researching robust state estimators for autonomous surface vessels (ASVs). By fusing data from an Inertial Measurement Unit (IMU), GPS, and a monocular camera capturing the horizon, I aim to estimate the complete state of our WAM-V 8 ASV. This will enable the creation of accurate seafloor maps even in challenging ocean conditions.
PUBLICATIONS
Invariant Extended Kalman Filter for Autonomous Surface Vessels with Partial Orientation Measurements
Derek Benham, Easton Potokar, Joshua G. Mangelson
Submitted to International Conference on Robotics and Automation (ICRA) 2026
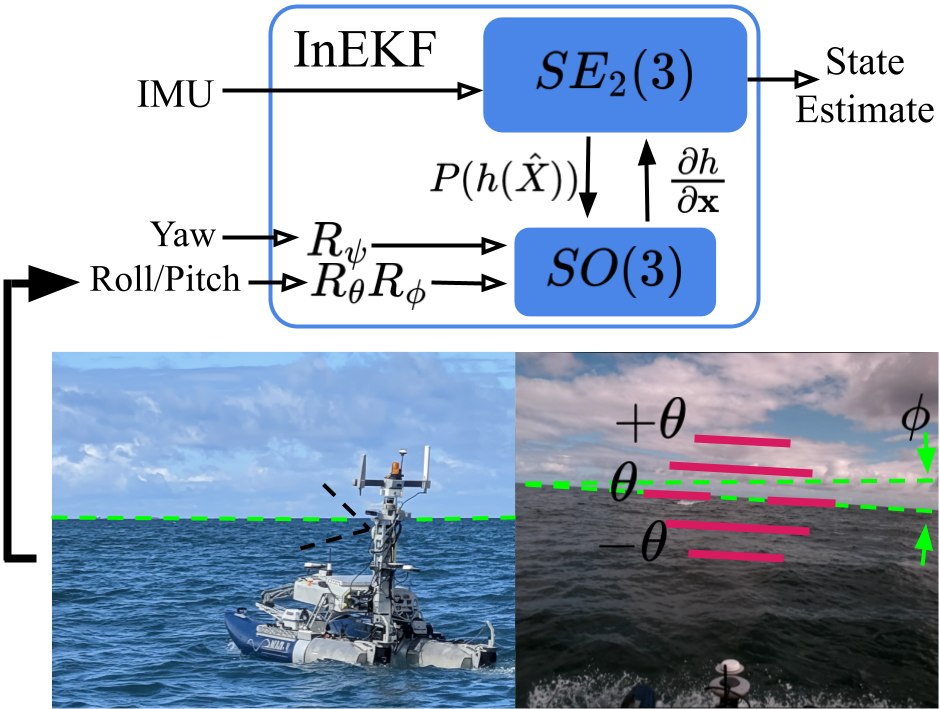
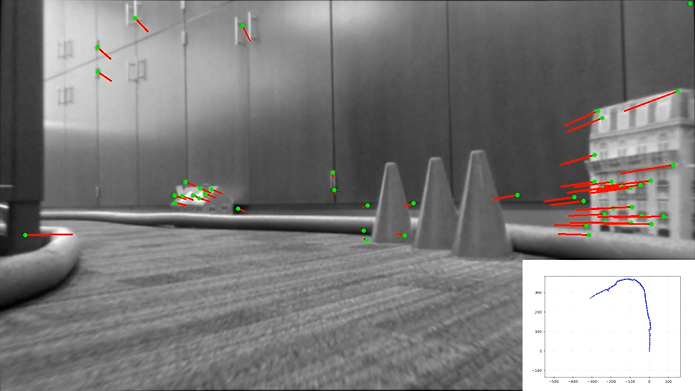
An overview of our novel proposed partial orientation measurement integration into the invariant EKF. The flow chart (top) shows how partial orientation measurements of roll and pitch, or yaw which reside in SO(3) are bridged to the filter state of SE_2(3) through the use of a planar frame and group homomorphisms. We then showcase the application of this framework to a simulated autonomous surface vessel (bottom left), where horizon observations from a forward-facing camera (bottom right) provide roll and pitch measurements for enhanced state estimation.
arXiv Pre-PrintOne-Way Acoustic Signal Localization using Received Signal Strength
Derek Benham, Clayton Smith, Tristan Hodgins, Ashton Palacios, Philip Lundrigan, Joshua G. Mangelson
IEEE OES/MTS OCEANS 2025 Great Lakes Conference, Chicago, USA
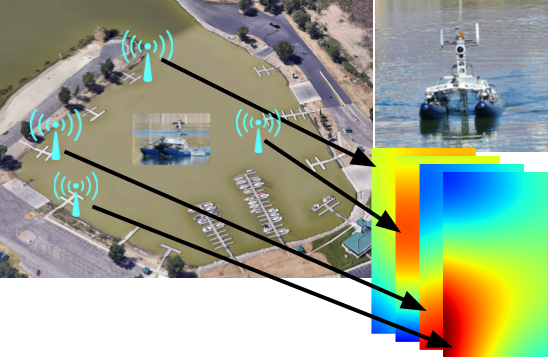
Our research platform, the WAM-V 8, localizes using received signal strength values from four acoustic modems in a marina. The signal strength of each beacon is modeled individually using a Gaussian Process (GP). Motion is sampled based on the commanded velocity and a heading measurement, then fused with the received signal strength measurements through a particle filter to estimate the vehicle position.
Full PaperLow-Cost Urban Localization with Magnetometer and LoRa Technology
Derek Benham, Ashton Palacios, Philip Lundrigan, Joshua G. Mangelson
International Conference on Intelligent Robots and Systems (IROS) 2024, Abu Dhabi, UAE
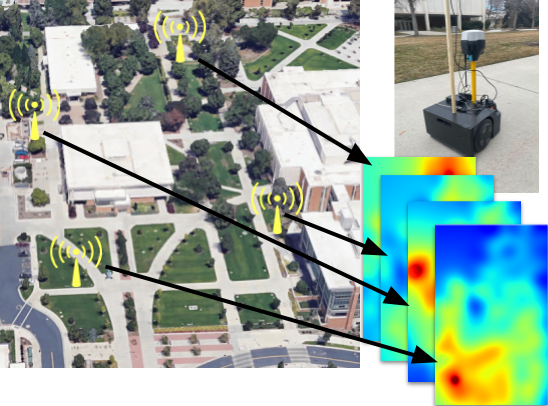
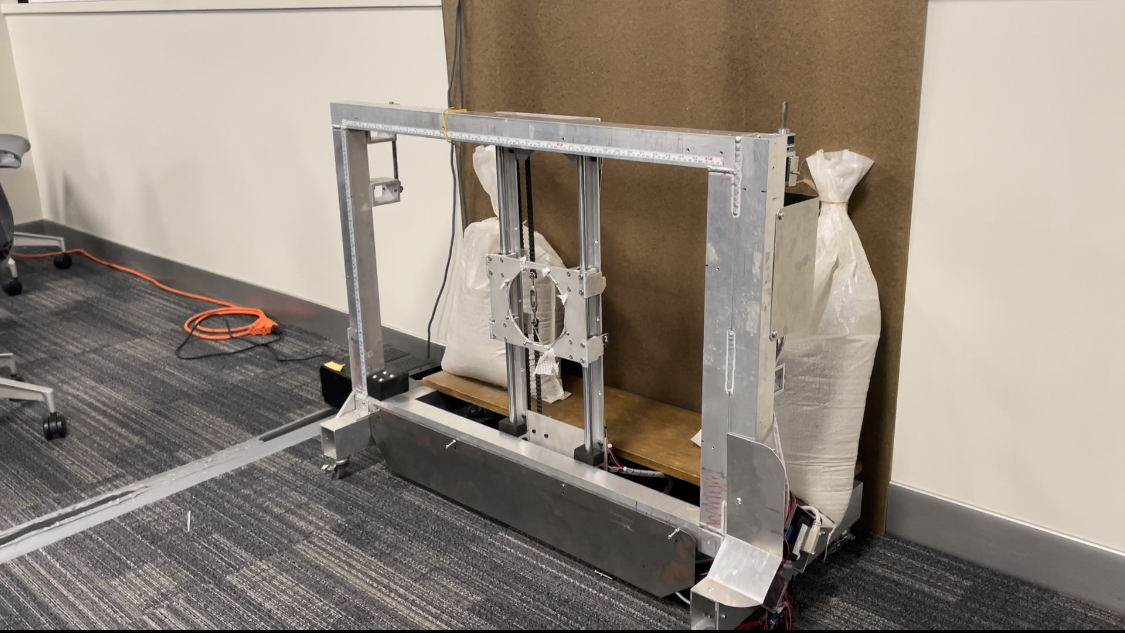
Our experimental low-cost research platform attempts to localize via received signal strength values from four different LoRa beacons on campus. The signal strength of each beacon is individually modeled by a GP. Motion is estimated using a magnetometer and a novel wireless signal strength similarity classifier. These motion estimates are then fused with observations of LoRa signal strength measurements using a particle filter.
Full Paper3D Reconstruction of Reefs using Autonomous Surface Vessels and an Analysis of Chain vs 3D Rugosity Measurement Robustness
Derek Benham, Aaron Newman, Kalai Ellis, Richard Gill, and Joshua G. Mangelson
IEEE/OES Oceans Conference 2022, Hampton Roads, VA
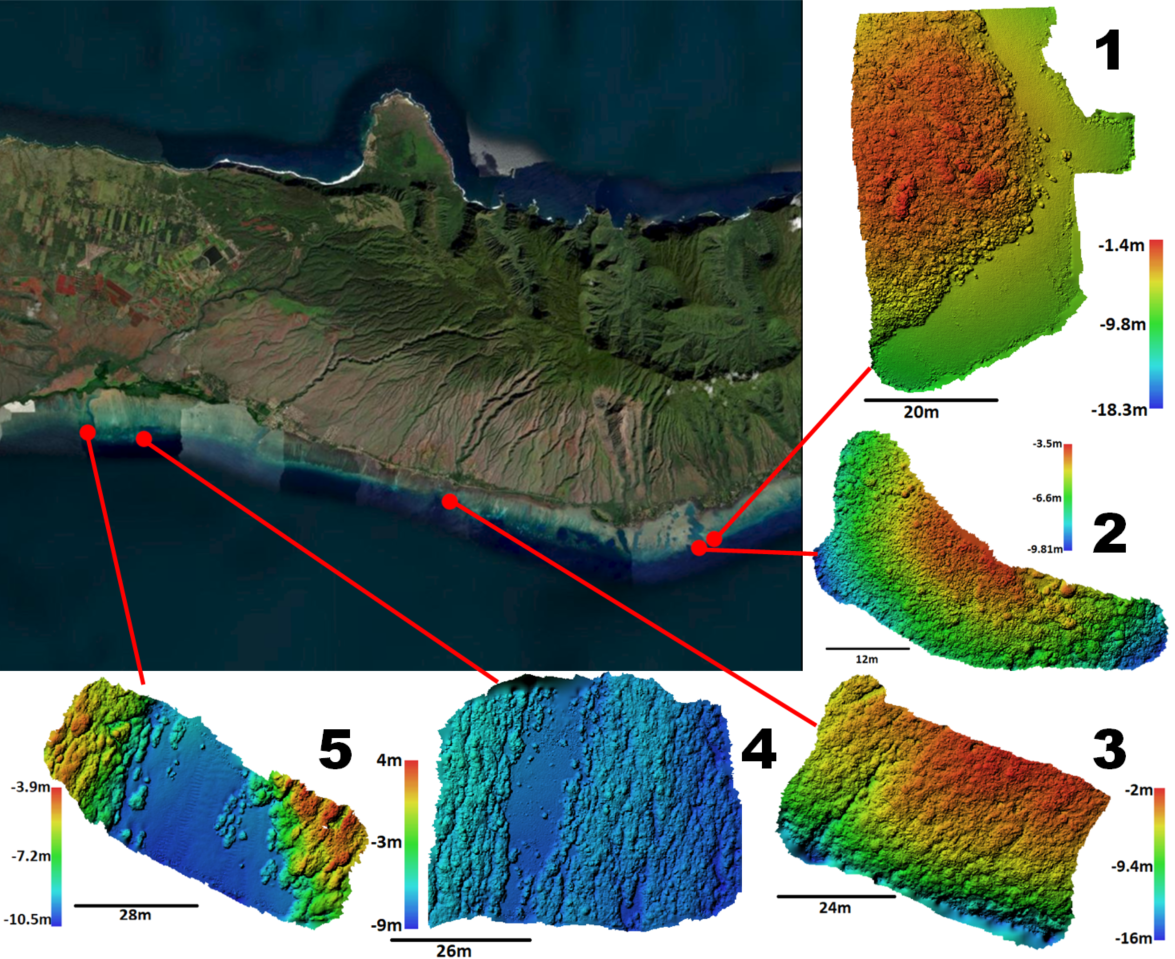
Reconstructions performed off the southern shore of Molokai, Hawaii using our retrofit Clearpath ASV recorded in November, 2021. Labeled are the five test sites with their respective digital elevation models.
Full PaperHoloOcean: Realistic Sonar Simulation
Easton Potokar, Kalliyan Lay, Kalin Norman, Derek Benham, Tracianne B. Neilsen, Michael Kaess, and Joshua G. Mangelson
International Conference on Intelligent Robots and Systems (IROS) 2022, Kyoto, Japan

HoloOcean, an underwater robotics simulator based on Unreal Engine, was upgraded to include implementations of multibeam imaging, multibeam profiling, side-scan, and echosounder sonars. Further, the noise models have been significantly improved to provide more realistic imagery.
Full PaperRecent Projects
Click to learn more