Remote Reef Sensing in Molokai Hawaii
July 2021 - Present

Overview
With terrestrial erosion threatening the largest fringing reef in the United States, a solution was needed
to remotely inspect the Molokai Hawaii reef in a precise way.
The remote sensing platform is built upon the now discontinued frame of the Heron robot by Clearpath Robotics.
The robot uses enclosed waterproof cameras mounted in a stereo configuration to take imagery of
the reef that is post processed to create 3D reconstructions of the surveyed site. In addition to the two
cameras, the robot is mounted with a Eureka Manta water quality sensor that measures temperature, turbidity,
pH and more. For localization and heading the robot uses a RTK GPS and an inertial measurement unit (IMU).
Survey waypoints are predetermined in a software used for drone surveying and a PID controller on the robot is
used for waypoint navigation. A custom electronics enclosure was needed to house the necessary equipment to
interface with all the sensors. The code, GPS, and IMU provided by Clearpath proved to be full of bugs and
insufficient which necessitated us to use our sensors and code instead of theirs, and only use the base
platform and motor controller.
For surveying, the robot would follow a crop row (lawn mower) path. The distance between overlapping paths
would be calculated based on the current depth of the water, we were operating in about 10-meter depth, so
that the camera images would have at least 70% image overlap to aid in image reconstruction. The cameras would
take images at 2Hz and tag the image with the current GPS coordinate of the camera. Because of the RTK GPS we
were able to achieve 2 cm accuracy of the true camera location which helped in image reconstruction. Survey
areas were reconstructed using Pix4D and Agisoft Metashape.
In October 2021 after months of testing we took the robot to Molokai Hawaii. After a scare of the robot
arriving late, we began surveying. We started with these murky fishponds that are native to Molokai. Due to
the poor water quality and heavy sediment deposits, imagery was useless in these areas, but the owners of the
fishponds were interested in the water quality because some of these ponds were infested with invasive jelly
fish. Using a local guide, we were able to travel to deeper waters and survey 5 different areas of the reef.
Each survey area was about 50m by 50m. This project a collaboration between the Engineering and Biology
Departments at Brigham Young University. We were able to provide the data that they thought was most
interesting, and they will be able to analyze the effects of the terrestrial erosion on the reef.
Originally, we planned to take the vehicle to Samoa, however due to Covid-19 restrictions, those plans have
been indefinitely suspended.
My Contributions
This was my first project after starting the PhD program at BYU in the Field Robotics Lab. The project was
originally a senior capstone project, but due to supply chain issues, the robot wasn’t delivered until 2
months before the end of the school year, so minimal work was done by them. From there an undergrad in the
lab, Aaron Newman took over the project for the summer developing most of the systems, and I joined in late
July.
While catching up and learning the system, I contributed by redoing the custom electronics box, reworking
cable management, and designing 3D printed mounts for the components inside. I also re did a lot of the
hardware mounting designs, relying on my skills as a mechanic to make everything simpler. After my
improvements system set up time (how long it takes to get it assembled and in the water) was cut in half. I
assisted in a lot of debugging, from power issues to software bugs. I wrote the program that given the GPS
location of the robot and the heading, could calculate the new GPS location of the cameras.
For the Hawaii trip in October 2021, I was the senior member of the project because Aaron was unable to go; as
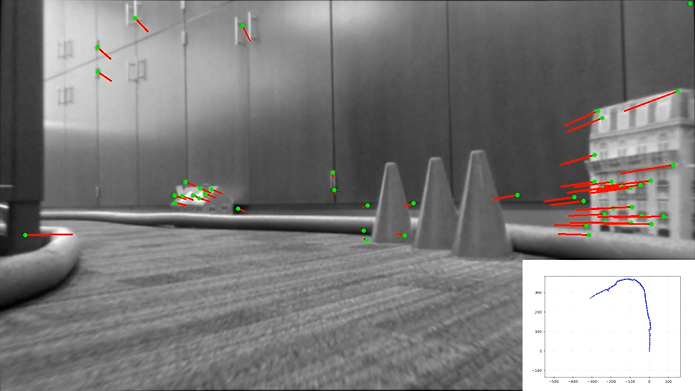
team lead I monitored assembly and operation of the robot. After the trip, I was vital in debugging why the 3D
reconstruction software was failing and wrote a program to preprocess the images in a way that maximized
feature extraction so the software could successfully reconstruct the survey area.

Aerial photo of surveying, I'm standing on the left boat, seasick...
Things I Learned and Skills Developed
Being my first project in the program, I learned a lot from low level system development to system integration and more specifically why the term ‘Integration Hell’ is so well known. This project was my first real experience with Linux development and PID controllers as well. I learned a lot about designing robustness into systems as well.
Code
Code cannot be shared from this project
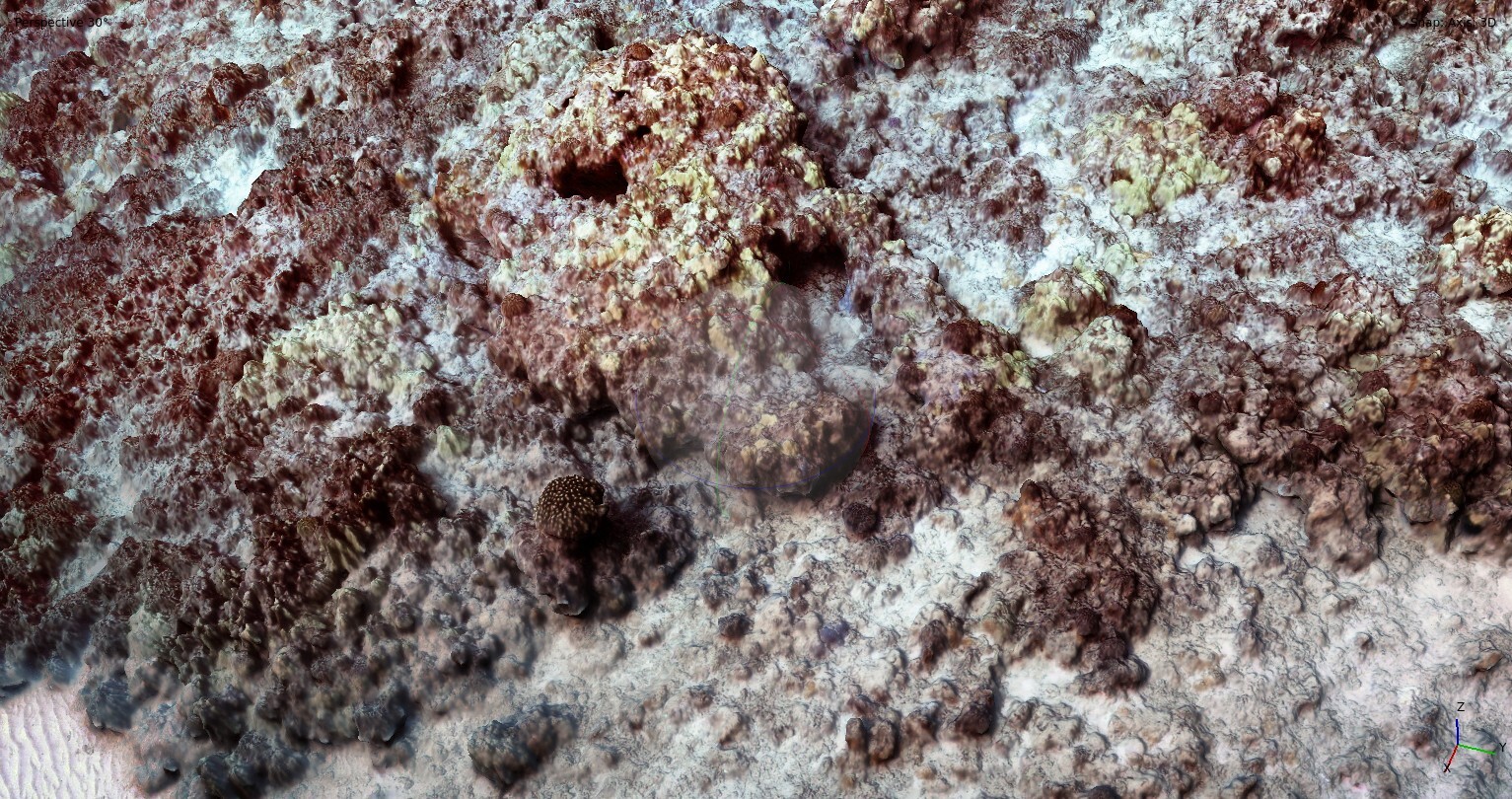
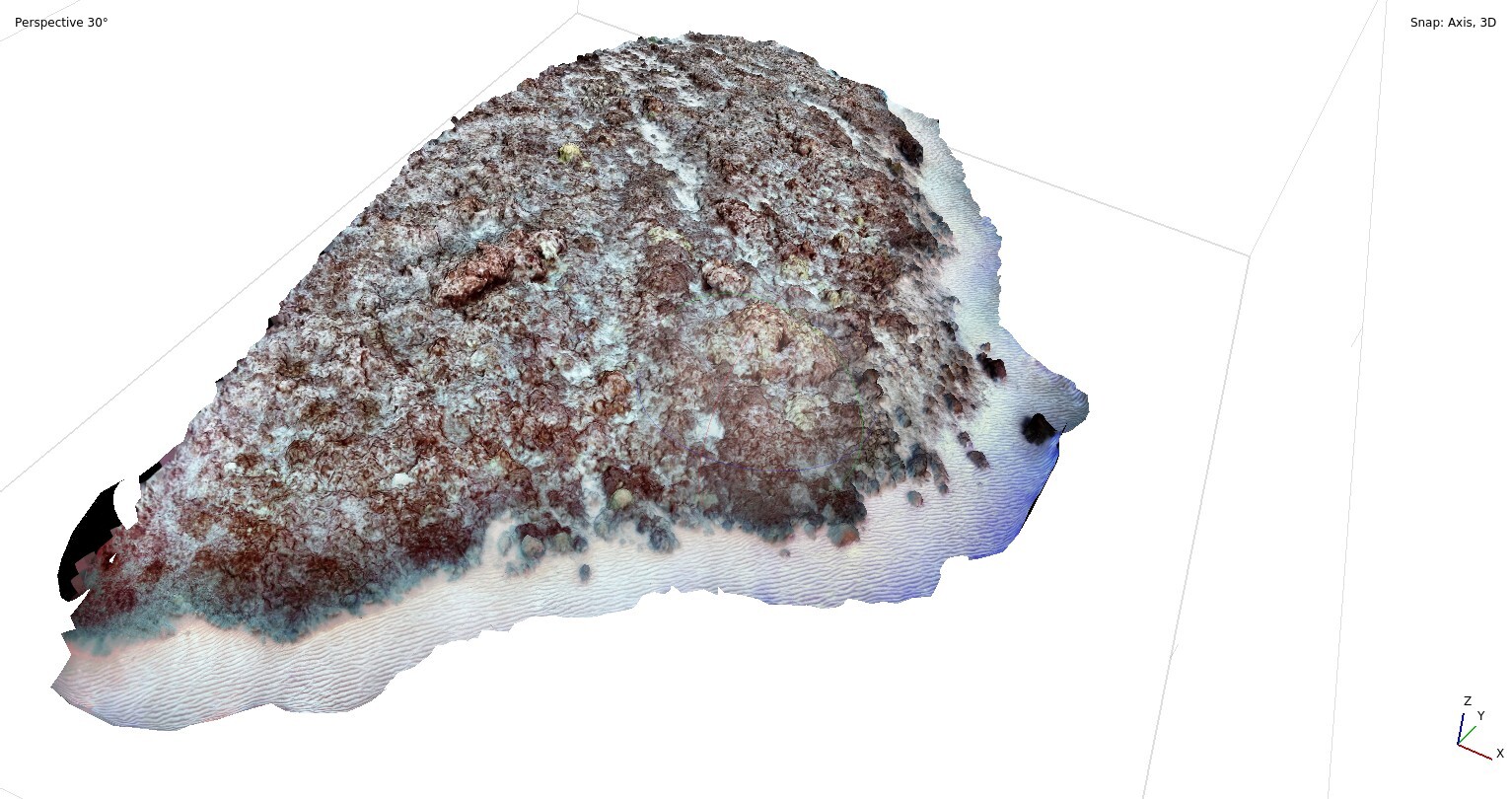
Reef Reconstruction Images
.jpg)